| nepřihlášený uživatel (pouze prohlížení) |
| přihlásit | registrace |
-
ZŠ, ZŠ+, SŠ, VŠ
Rovnoměrný přímočarý pohyb -
SŠ, VŠ
Rovnoměrně zrychlený přímočarý pohyb -
SŠ, SŠ+, VŠ
Rovnoměrný pohyb po kružnici I -
SŠ, SŠ+
Rovnoměrný pohyb po kružnici II
-
SŠ, SŠ+, VŠ
Nepružné srážky těles -
SŠ, SŠ+, VŠ
Pružné srážky těles
-
SŠ, SŠ+, VŠ
Matematické kyvadlo a tíhové zrychlení -
SŠ+, VŠ
Matematické kyvadlo se zarážkou -
SŠ, SŠ+, VŠ
Pružinový oscilátor a tuhost pružiny -
SŠ+, VŠ
Pružinový oscilátor a spojování pružin

si můžete zobrazit video z příslušného videopokusu na celou obrazovku?
Pružinový oscilátor a tuhost pružiny
Střední škola
Střední škola, pokročilí
Vysoká škola
 |
30. 3. 2012, 19:25 |  |
15. 12. 2012, 17:26 |  |
Zdeněk Pucholt |
Cíl úlohy
Určit tuhost pružiny na základě znalosti doby kmitu pružinového oscilátoru.
Fyzikální princip
S kmitavým pohybem se v běžném životě setkáváme velmi často (pohyb pístu v motoru automobilu, chvění ušního bubínku, pulzace srdce,...). Jedná se o pohyb, při kterém se těleso pohybuje v blízkosti rovnovážné polohy. V případě, že tímto místem těleso prochází pravidelně, označujeme takový pohyb jako periodický kmitavý pohyb.
Mechanickým oscilátorem pak nazveme volně kmitající těleso (bez vnějšího působení). V dalším se omezíme na konkrétní typ oscilátoru – pružinový oscilátor, který je tvořen pružinou zanedbatelné hmotnosti a zavěšeným závažím o hmotnosti $m$.
Jestliže pro zrychlení harmonického kmitavého pohybu platí $a=-\omega^2y$, pak na základě II. Newtonova pohybového zákona můžeme pro sílu $\vec{F}$ způsobující harmonické kmitání psát
\begin{equation} F=ma=-m\omega^2y\:\mbox{,}\label{eq:rce1} \end{equation}což představuje pohybovou rovnici mechanického oscilátoru.
Úhlová frekvence pružinového oscilátoru $\omega$ je ovlivněna hmotností zavěšeného závaží $m$ a tuhostí pružiny $k$. Tuhost pružiny je vlastnost pružiny projevující se při její deformaci – natahování. Pokud označíme počáteční délku nenatažené pružiny $l_0$ a délku pružiny po natažení $l$, pak pro délkový rozdíl platí
$$\Delta l = l-l_0\:\mbox{.}$$Aby mohla být pružina natažena, musíme na ni působit vnější silou. Reakcí k této vnější síle je síla pružnosti $\vec{F}_{\rm p}$, která brání deformaci pružiny. V případě, že se jedná o pružnou deformaci probíhající podle Hookova zákona, lze sílu pružnosti vyjádřit vztahem
\begin{equation} F_{\rm p}=k\Delta l\:\mbox{.}\label{eq:rce2} \end{equation}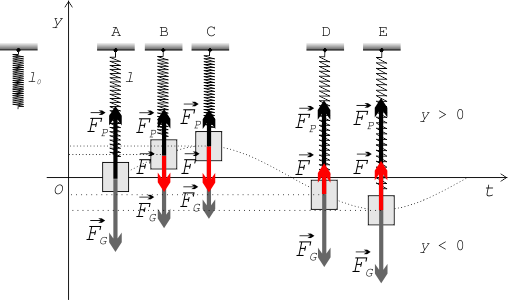
Je-li pružinový oscilátor v rovnovážné poloze (na obr. A), tíhová síla a síla pružnosti mají stejnou velikost, ovšem opačný směr. Lze pak psát
\begin{equation} k\Delta l-mg=0\:\mbox{.}\label{eq:rce3} \end{equation}Při vychýlení oscilátoru z rovnovážné polohy o $y$ směrem nahoru (na obr. B), se mění velikost síly pružnosti, zatímco velikost tíhové síly zůstává neměnná. Na oscilátor vždy působí výsledná síla $\vec{F}$
$$\vec{F}=\vec{F}_{\rm p}+\vec{F}_{\rm G}\:\mbox{.}$$Za využití \eqref{eq:rce2} a \eqref{eq:rce3} lze pro velikost této síly psát $F=k(\Delta l-y)-mg=k\Delta l-mg-ky=-ky$.
Příčinou harmonického kmitání mechanického oscilátoru je síla, která je přímo úměrná výchylce oscilátoru z rovnovážné polohy a směřuje vždy do rovnovážné polohy. Pro její velikost platí
$$F=-ky\:\mbox{.}$$Při srovnání s \eqref{eq:rce1} je patrné, že $-m\omega^2y=-ky$, odkud pro úhlovou frekvenci mechanického oscilátoru platí
$$\omega^2=\frac{k}{m}\:\mbox{.}$$Za využití $\omega = \frac{2\pi}{T}$ dostáváme vztah pro periodu vlastního kmitání pružinového oscilátoru
\begin{equation} T_0=2\pi\sqrt{\frac{m}{k}}\:\mbox{.}\label{eq:rce4} \end{equation}V případě určování tuhosti pružiny dynamickou metodou z doby kmitu pružinového oscilátoru, vyjadřujeme ze \eqref{eq:rce4} tuhost
\begin{equation} k=4\pi^2\frac{m}{T_0^2}\:\mbox{.}\label{eq:rce5} \end{equation}Videoanalýza
Za využití videoanalýzy lze experimentálně stanovit velikost tuhosti pružiny tzv. dynamickou metodou, tedy na základě znalosti velikosti periody kmitání a hmotnosti zavěšeného závaží. Tuto zjištěnou hodnotu pak lze následně porovnat s výsledkem tzv. statické metody, která je založena na postupném zavěšování závaží na pružinu a využití vztahu \eqref{eq:rce2}.
Pomůcky
Pružiny o různých tuhostech, závaží k zavěšení, stojan s držáky, kamera, software pro analýzu a zpracování videa.

Provedení
- K prvnímu měření tuhosti pružiny využijeme pružinu s větším průměrem. Umístíme ji na stojan a zavěsíme na ni závaží o hmotnosti $m$, konkrétně v tomto případě $m=603\:\rm{g}$.
- Do videa umístíme vhodný předmět (pravítko), který využijeme jako kalibrační vzdálenost ve videu.
- Kameru umístíme tak, aby byl v záběru celý oscilátor včetně dostatečného prostoru pro dokreslování vektorů vybraných veličin. Dále provedeme vyrovnání kamery do vodorovného směru.
- Pro jednotlivé snímky videa lze určit velikosti okamžité rychlosti a zrychlení a příslušné vektory do výstupního videa zobrazit. V našem případě jsou ve videu zakresleny vektory pro okamžitou rychlost (slabě červený vektor), zrychlení (výrazný červený vektor) a vektory působících sil, konkrétně tíhová síla (modrá barva) a síla pružnosti (žlutá barva), včetně jejich výslednice (červená barva).
- Videoanalýza umožňuje poměrně přesně určit dobu kmitu pružinového oscilátoru, což využijeme k určení tuhosti pružiny na základě znalosti hmotnosti zavěšeného závaží.
- Výstupem videoanalýzy je komplexní video obsahující zakreslení vektorů vybraných fyzikálních veličin a grafy závislostí y-souřadnice na čase $y(t)$, rychlosti na čase $v_{\rm y}(t)$ a zrychlení na čase $a_{\rm y}(t)$.
- Totéž lze provést i pro pružinu s menším průměrem.
Vyhodnocení
- Do výstupního videa byly zakresleny vektory okamžité rychlosti, zrychlení a vektory působících sil – tíhové síly a síly pružnosti. Je zřejmé, že velikost tíhové síly je konstantní, ovšem velikost síly pružnosti se mění v závislosti na prodloužení pružiny. Tuhost pružiny vystupuje ve vztahu \eqref{eq:rce2} jako koeficient úměrnosti mezi silou pružnosti a prodloužením pružiny.
- Největší rychlost má oscilátor při průchodu rovnovážnou polohou, kdy je hodnota y-souřadnice nulová, nulovou rychlost má při dosažení amplitudy – maximální hodnoty y-souřadnice. Naopak zrychlení je největší v amplitudách, nejmenší v rovnovážné poloze.
- Pro pružinu s menším průměrem lze statickou metodou stanovit velikost tuhosti $k_{\rm s}=26,6\:{\rm N\cdot m^{-1}}$. Jelikož perioda pro závaží o hmotnosti $m=603\:\rm{g}$ je na základě dynamické metody rovna $T=0,96\:\rm{s}$, dostáváme na základě \eqref{eq:rce5} hodnotu tuhosti $k_{\rm d}=25,8\:{\rm N\cdot m^{-1}}$.
- Pro pružinu s větším průměrem (zobrazena na hlavním videu) lze statickou metodou stanovit velikost tuhosti $k_{\rm s}=20,2\:{\rm N\cdot m^{-1}}$. Jelikož perioda pro závaží o hmotnosti $m=603\:\rm{g}$ je na základě dynamické metody rovna $T=1,08\:\rm{s}$, dostáváme na základě \eqref{eq:rce5} hodnotu tuhosti $k_{\rm d}=20,4\:{\rm N\cdot m^{-1}}$.
- Z naměřených výsledků je zřejmé, že pomocí videoanalýzy lze velmi pohodlně stanovit tuhost pružiny. Výsledek měření je v rámci naší přesnosti v dobrém souladu s výsledkem statické metody.
Použitá literatura a zdroje
- LEPIL, Oldřich. Fyzika pro gymnázia: Mechanické kmitání a vlnění. 3. přeprac. vyd. Praha: Prometheus, 2001, 129 s. ISBN 80-719-6216-3.




Přírodovědecká fakulta Univerzity Palackého
17. listopadu 1192/12
Olomouc, CZ-771 46, Česká republika
Telefon: +420 585 634 151
